脚を溶かして高さを調整、新発想の環境適応ロボット
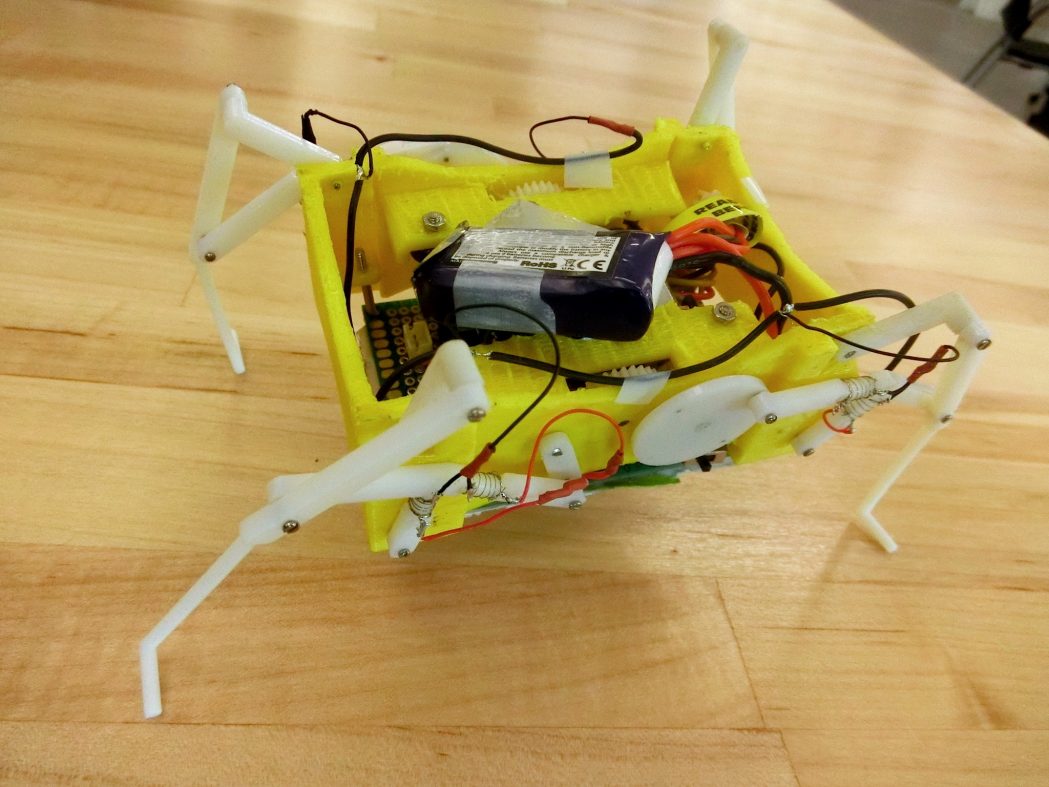
自らの構造を溶かして再び固めることで、状況に応じて歩行スタイルを変更できるロボットが誕生した。
仕組みはこうだ。4本脚を持つこの小型ロボットは3Dプリントのプラスチック構造で作られており、特定部分を熔かして再び硬化させ 、さまざまな動きに合わせて脚を最適化できる「形状モーフィング関節(Shape morphing joints)」が組み込まれている。電圧が加わると熱くなるワイヤーが関節に巻きつけられており、10秒で関節が軟化する。関節が軟化することで脚の位置を変化させ、障害物を乗り越えたり、その下をくぐったりできる。
生みの親であるコロラド州立大学のジャングオ・ザオ博士は、この仕組みを利用することで、コストや重量、複雑性などを増やさずにロボットの能力を向上できるとIEEEスペクトラム(IEEE Spectrum)(米国の電気工学技術の学会誌)で語っている。いつの日かこれと似たような構造が、環境モニタリングなどの多様な作業に適応する必要のあるロボットに役立つかもしれない。
ロボットの映像はここで見られる。
 オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
 eムック『人体拡張』特集号
eムック『人体拡張』特集号
 期待外れのCRISPR治療、包括的承認で普及目指す新興企業
期待外れのCRISPR治療、包括的承認で普及目指す新興企業 書評:サム・アルトマンはいかにして「AI帝国」を築いたか
書評:サム・アルトマンはいかにして「AI帝国」を築いたか