なぜ走行中の車両に着陸する自律ドローンの研究が重要なのか?
ドローンは航続距離が短いのが欠点で、宅配ビジネスの実用化を困難にしている。しかし、走行中の車両で離着陸できれば、再充電にかかる時間を短縮し、実用化が近づくかもしれない。 by Emerging Technology from the arXiv2016.12.01
荷物の配達は、自動化されたドローンの利用方法として、大きな可能性がある。しかし、航続距離に限界があり、実用化の目処はたっていない。そこで、配送トラックで荷物と一緒に運んだドローンを、配達先までの最後の数百mほどを担当させ、戻ってきた機体を充電するアイデアがある。ドローンは荷物を運搬するトラックから飛び立ち、配達が済んだら戻って来るわけだ。
この手法は、ドローンが走行中の車両で離着陸できれば、トラックは配達中に停止していなくて済むので特に魅力的になる。
走行中の車両からの離陸は、事実上、風の強い日に離陸するのと同じことだから簡単だ。しかし着陸は別の話で、興味深い課題が生じる。自律飛行中のドローンは、走行中の車両に着陸できるだろうか?
11月30日、モバイル・ロボティクス(カナダ・モントリオール州)の自律システム研究所に所属する、アレクサンドロ・ボロズウィックの研究チームのおかげで、答えが得られた。研究チームは低コストのセンサーを使って、自律型のドローンが走行中の車両に着陸できるようにするシンプルなシステムを作ったのだ。
システムは、AprilTagと呼ばれる二次元バーコードが描かれた着陸パッドと、GPS座標と動きの変化を配信するために装備された携帯電話で構成されている。
クアッドコプターには専用のGPSユニットと慣性測定用ユニットが装備されており、三次元空間における位置を正しく認識できるようになっている。また、手ぶれ補正や画像処理、軌道計算用の内蔵チップもある。
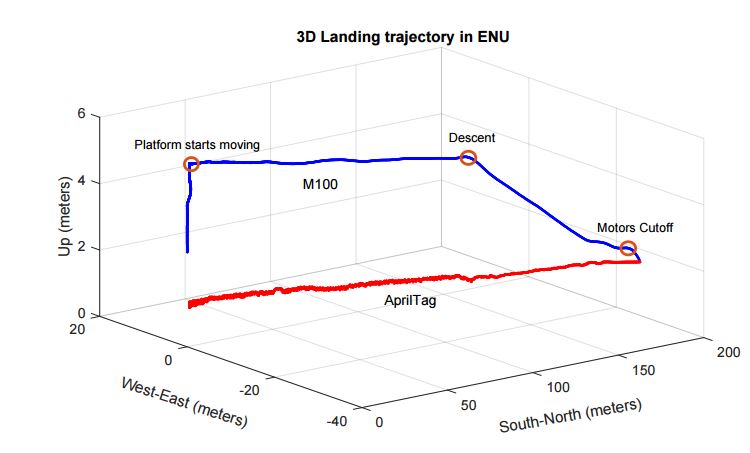
着陸は2段階で実施する。最初の段階では、クアッドコプターは自機と車両の位置から、着陸軌道を計算する。
次の段階では、内蔵カメラで着陸パッドのバーコードの位置を特定し、車両の屋根にあるパッドに着陸するまで機体を誘導する。
結果は見ての通りだ。研究チームは、システムを使って自律型クアッドコプターを走行中の車両に、時速30km、40km、50kmで着陸させたのだ。「私たちはマルチローターのMAVを地上を走る車両に自動着陸させる実験で、現在までに最大時速50kmの飛行速度によるテストに成功した」と研究チームはいう。
この素晴らしい研究は輸送インフラの革新に貢献し、ドローン宅配は早期に実現させるかもかもしれない。
参照:arxiv.org/abs/1611.07329: マルチローターのドローンによる高速走行車両への自動着陸
- 人気の記事ランキング
-
- It’s time to address the looming crisis in entry-level work. 「コーディングを学べ」もう通用せず、AIが若者の雇用を奪い始めた
- Promotion Call for entries for Innovators Under 35 Japan 2026 「Innovators Under 35 Japan」2026年度候補者募集のお知らせ
- Anthropic’s Code with Claude showed off coding’s future—whether you like it or not 「Claudeに任せてしまおう」 たった1年で激変したソフトウェア開発
- A reality check on the AI jobs hysteria 「ホワイトカラー消滅」 まだデータに兆候なし ——ただし若者に警戒信号
- Inside the stealthy startup that pitched brainless human clones 「臓器袋」から全身置換へ ステルス企業R3が隠す 「脳なし」クローン計画
- エマージングテクノロジー フロム アーカイブ [Emerging Technology from the arXiv]米国版 寄稿者
- Emerging Technology from the arXivは、最新の研究成果とPhysics arXivプリプリントサーバーに掲載されるテクノロジーを取り上げるコーネル大学図書館のサービスです。Physics arXiv Blogの一部として提供されています。 メールアドレス:KentuckyFC@arxivblog.com RSSフィード:Physics arXiv Blog RSS Feed