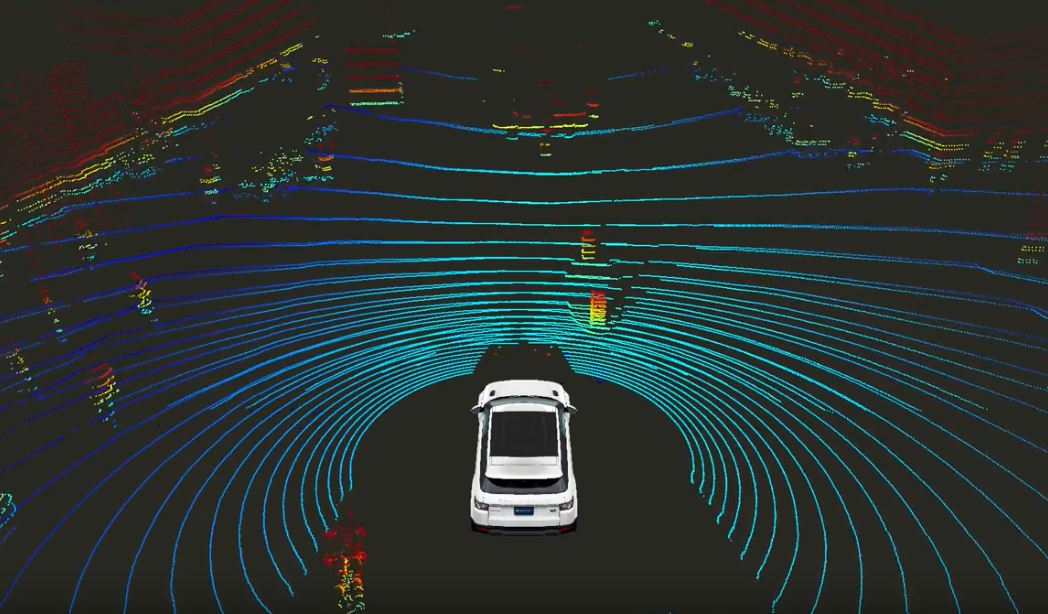
自律自動車向けの高精度地図、まだ見えぬ勝者への道筋
自動車メーカーとテック企業は、ロボットカーの運転を支援する高精度地図(HDマップ)を求めている。だが、高精度地図を作る最善なアプローチはまだ見つかっていないと、ブルームバーグは報じてしている。
ブルームバーグは、「(アプローチの)1つは、未来の無人自動車を自力で完全にナビゲートすることを目指している」と説明する。「もう1つは、現在ある車のセンサーを使って段階的に自動化していくための地図を作成する」。
これらのアプローチにも、さらにさまざまな違いがある。ブルームバーグは「自動運転用の地図は、地図を作成する車両のセンサー・システムに依存するため、違いがある」という。
HDマップの競争はアルファベット(グーグル)傘下のウェイモ(Wyamo)がリードしていると考えられているが、モービルアイ(Mobileye)やテスラ、トムトム(TomTom)などの他の企業はスクラムを組んでいる。さらにブルームバーグは、多数のスタートアップが「ベンチャー・キャピタルの資金に群がり、それぞれがこの課題に別の方法で挑戦しようとしている」と付け加える。さまざまな企業が、微妙に異なったアプローチをとっているのだ。
自律自動車向けのHDマップは、勝者総取りとなるのだろうか? アンドリーセン・ホロウィッツ(Andreessen-Horowitz)の共同経営者ベネディクト・エヴァンスは、HDマップにはネットワーク効果がある述べている。より多くの車両を保有している集団が作る地図の方が、小規模の集団が作る地図よりも頻繁に更新される。だから、より多くの仲間を必要としているのだ。
- 参照元: Bloomberg
 オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
 eムック『人体拡張』特集号
eムック『人体拡張』特集号
 期待外れのCRISPR治療、包括的承認で普及目指す新興企業
期待外れのCRISPR治療、包括的承認で普及目指す新興企業 書評:サム・アルトマンはいかにして「AI帝国」を築いたか
書評:サム・アルトマンはいかにして「AI帝国」を築いたか