アリやゴキブリの動きを模倣、東工大が6脚ロボットを開発
長い年月をかけて進化した生物は、自然環境に対応したり外敵から身を守るための機能を身に付けてきた。この優れた機能を模倣した工業製品の開発はバイオミメティクス(生物模倣技術)と呼ばれ、絹糸を模したナイロン繊維の実用化など20世紀前半から進められている。最近ではAIの分野でも、昆虫が持つ学習機能をニューラル・ネットワークに模倣しようとする研究もある。
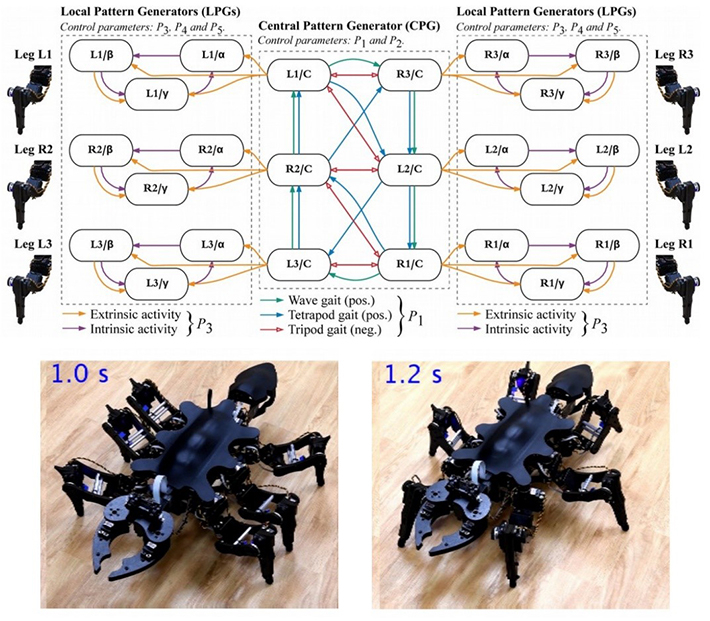
昆虫はさまざまな状況に応じて歩行パターンや歩行速度が即座に調整でき、大きさや形態などが異なっても同じパターンで移動できる。この能力をロボットに応用する研究も以前から進められているが、6本の足とその関節の制御が複雑だった。東京工業大学の小池康晴教授らの研究チームが開発したのは、上層で全体の動き制御し、下層で個別に足を制御する2階層構造の六脚ロボット制御装置だ。2階層構造にすることで、ロボットの動作や速度、姿勢などの複雑な制御が簡素化できる。
小池教授らはこの制御装置を人間の脳と連携させ、考えるだけでロボットの動きを制御することも期待している。高い歩行能力を持つロボットが遠隔から直感的に操作できるようになれば、災害時にがれきの中から被災者を発見するようなロボットの実現も、そう遠くないかもしれない。
- 参照元: 東京工業大学
 オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
 eムック『人体拡張』特集号
eムック『人体拡張』特集号
 期待外れのCRISPR治療、包括的承認で普及目指す新興企業
期待外れのCRISPR治療、包括的承認で普及目指す新興企業 書評:サム・アルトマンはいかにして「AI帝国」を築いたか
書評:サム・アルトマンはいかにして「AI帝国」を築いたか