ロボットに一発で芸を仕込む新手法、UCバークレーが開発
研究者は「ワンショット学習」と呼ばれる手法を使って、ロボットがそれまでに見たことがない物でも持ち上げられるように教育した。
ワンショット学習とは、1つのデータ要素を与えるだけでタスクを実行できる人工知能(AI)ソフトウェアである。
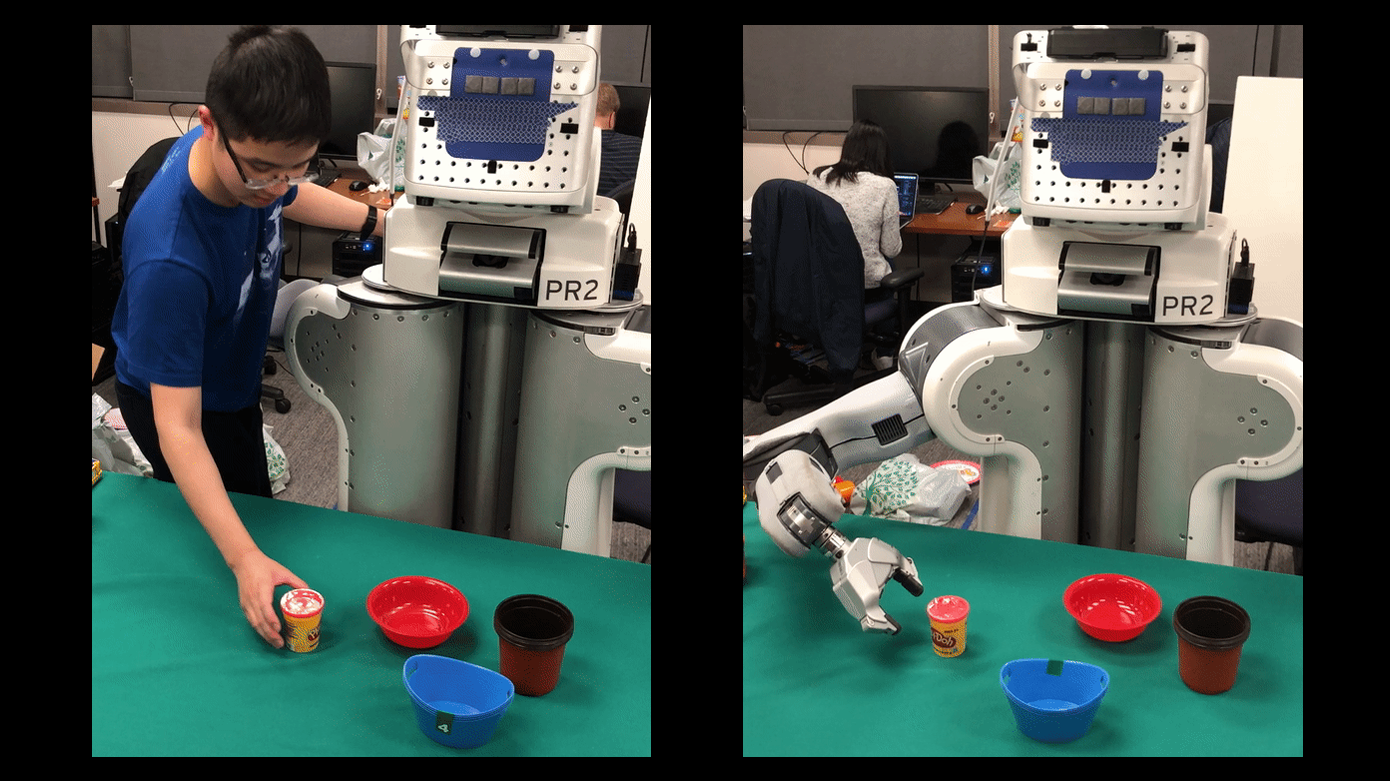
カリフォルニア大学バークレー校の研究者は、アーカイヴ(arXiv)に掲載された論文(PDF)で、初めて目にする物体を持ち上げられるロボット・システムを開発したことを明らかにした。このロボットのアルゴリズムは、人間とロボットがさまざまな物体を持ち上げる映像を見ることによって、最初に訓練された。そのあとが「ワンショット」の部分だ。ロボットは人間が新しい物体を掴み上げる1本の映像を見て、それを模倣しなければならなかった。
たとえば、物体を掴んでから押す、といったまったくの新しい動きにはまだ対応できない。しかし、より多くのデータが集まり、ロボットの学習モデルの改良が進めば、それも可能になると研究者は考えている。
機械学習では、アルゴリズムを訓練するために大量のデータと時間を要する。ワンショット学習が進歩すれば、機械学習プロセスが効率化され、AIに新しい「芸」を仕込むのに必要なコンピューティング・リソースを劇的に減らせる可能性がある。
 オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
オープンAIが「年齢予測」導入、子ども保護の責任誰が負う?
 eムック 『新・陰謀論の時代 社会を蝕む「信念」の正体』特集号
eムック 『新・陰謀論の時代 社会を蝕む「信念」の正体』特集号 期待外れのCRISPR治療、包括的承認で普及目指す新興企業
期待外れのCRISPR治療、包括的承認で普及目指す新興企業 書評:サム・アルトマンはいかにして「AI帝国」を築いたか
書評:サム・アルトマンはいかにして「AI帝国」を築いたか





